This week (April 16, 2019), Pure released the 2.4.0 version of the Pure Service Orchestator for Kubernetes. This inlcuded: (from the release notes)
PSO Operator is now the preferred install method for PSO on OpenShift 3.11 and higher versions. The PSO Operator packages and deploys the Pure Service Orchestrator (PSO) on OpenShift for dynamic provisioning of persistent volumes on FlashArrays and FlashBlades. The minimum supported version is OpenShift 3.11. This Operator is created as a Custom Resource Definition from the pure-k8s-plugin Helm chart using the Operator-SDK. This installation process does not require Helm installation.
Added flasharray.iSCSILoginTimeout parameter with default value of 20sec.
Added flasharray.iSCSIAllowedCIDR parameter to list CIDR blocks allowed as iSCSI targets. The default value allows all addresses.
flexPath config parameter location in values.yaml has been moved from version 2.2.1 from under orchestrator field. Upgrading from version earlier than 2.3.0, needs change to values.yaml to use the new location of flexPath for PSO to work.
Some Highlights
The Operator is a big change for the install process. We are not leaving or abandoning Helm. I love Helm. Really. This was for our customers that do not allow Helm to run in their environments. Mainly the Tiller pod ran with more permissions than many security teams were comfortable with. Tillerless Helm is coming if you are worried now. The Operator will be the peferred method for RedHat OpenShift 3.11 and higher.
The flexPath: changing places in the values.yaml is good to know. We wanted to make that setting a top level setting and seperate it from being nested too far down. While we are sitll on the FlexVolume driver this is important. The newest values.yaml in the Helm chart even has several examples of paths depending on your distro of K8s. This becomes a non-issue with the CSI plugin we are working on. (Hooray!)
Last but not least, the iSCSIAllowedCIDR limits the iSCSI targets PSO will have the worker node log into during the Persistent Volume mount process. This is important to environments that may serve many different clusters with their own iSCSI networks. The iSCSI interfaces on a FlashArray can be divided with VLANS, but with this the traditional way to acquire target ip’s results in a long list of addresses to attempt to login. The iSCSIAllowedCIDR setting helps PSO know what subnet your cluster should try to mount and log into. The result is faster mounting and less noise around timeouts for networks your cluster might not be able to reach.
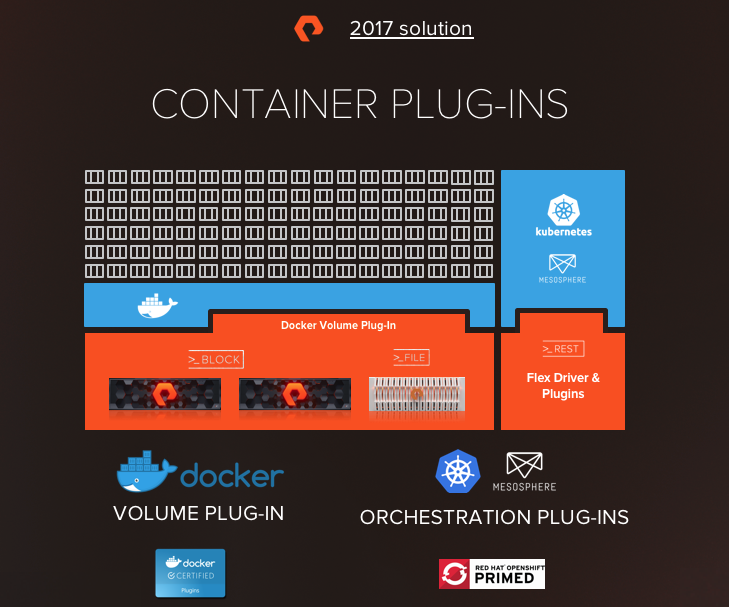
At Pure we have been working hard to develop a way to provide a persistent data layer that is able to meet the expectations of our customers for ease of use and simplicity. The first iteration of this was the release as the Docker and Kubernetes Plugins.
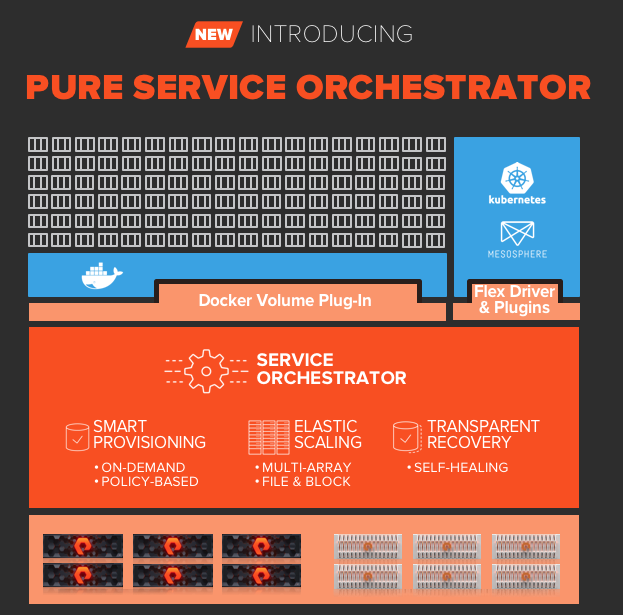
The plugins provided automated storage provisioning. Which solved a portion of the problem. All the while, we were working on the service that resided within those plugins. A service that would allow us to bring together managing many arrays. Both block and file.
The new Pure Service Orchestrator will allow smart provisioning over many arrays. On-demand persistent storage for developers placed on the best array or adhering to your policies based on labels.
The second way that may fit into your own software deployment strategy is using Helm. Since using Helm provides a very quick and simple way to install and it may be new to you the rest of this post will be how to get started with PSO using Helm.
Installing Helm
Please be sure to install Helm using the correct RBAC intructions.
You can run a dry run of the installation if you want to see the output but not change anything on your cluster. It is important to remember the path to the yaml file you created above.
Since we do not want to assume you only have Pure Storage in you environment we do not force ‘pure’ as the default StorageClass in Kubernetes.
If you already installed the plugin via helm and need to set the default class to pure run this command.
kubectl patch storageclass pure -p '{"metadata": {"annotations":{"storageclass.kubernetes.io/is-default-class":"true"}}}'
If you have another storage class set to default and you wish to change it to Pure you must first remove the default tag from the other StorageClass and then run the command above. Having two defaults will produce undesired results. To remove the default tag run this command.
Maybe you are a visual learner check out these two demos showing the Helm installation in action.
Updating your Array information
If you need to add a new FlashArray or FlashBlade simply add the information to your YAML file and update via Helm. You may edit the config map within Kubernetes and there are good reasons to do it that way, but for simplicity we will stick to using helm for changes to the array info YAML file. Once your file contains the new array or label run the following command.
Next step in learning helm is being able to take an existing helm package and put it in your own repo.
There are ways to do this with github pages. I don’t really want mess withthat right now, how can I use a Github repo to host my changes to the deployment?
For installing helm and an additional demo please see part 1 of this series.
Over the last few weeks I was setting up Kubernetes in the lab. One thing I quickly learned was managing and editing yaml files for deployments, services and persistent volume claims became confusing and hard. Even when I had things commited in github sometimes I would make edits then not push them then rebuild my K8s cluster.
The last straw was when 2 of our Pure developers said that editing yaml in vi wasn’t very cool and to start using helm.
Needless to say that was good advice. I still have to remember to push my repos to github. Now my demostration applications are more “cloud native”. I can create and edit them in one environment and use helm install in another and have it just work.